Digital Control of a Magnetic Levitation System
Magnetic levitation (Maglev) systems, widely used in high-speed trains and industrial applications, rely on precise control to suspend objects using electromagnetic forces. In this project, I explores digital control methods to design and simulate a Maglev system, ensuring stable levitation of a steel ball using control strategies.
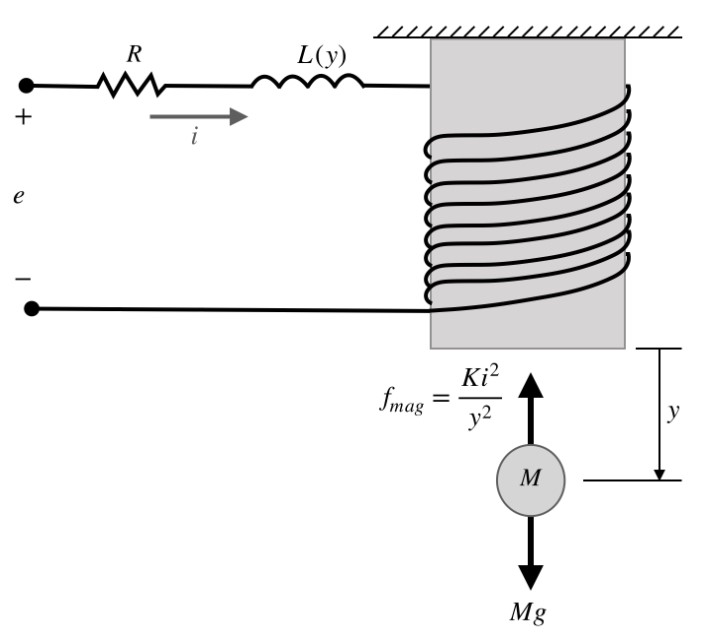
The project starts by formulating the nonlinear equations governing the system dynamics, incorporating electromagnetics and motion equations. The system is then linearized around an equilibrium point to simplify control design, followed by discretization for digital implementation.
To design a proper control system, several control strategies were tested to stabilize the system and meet performance specifications:
- Lead Compensator: Initially tested but found unsuitable due to high steady-state error and control signal constraints.
- PD Controller: While effective in stabilizing the system, it led to control signals exceeding allowable voltage limits.
- Double Lead Compensator: Through trial and error, this method was found to be the best choice, balancing system stability, transient response, and control signal constraints. Advanced Techniques for Improved Performance
To further refine control, a state-feedback controller with integral action was implemented, eliminating steady-state error. Additionally, a full-order deadbeat observer was designed to estimate system states efficiently. Lastly, the study examined the impact of sinusoidal disturbances, showing how an observer-based compensation technique could mitigate external forces affecting the ball’s position.
Please see the detailed report here.