Polyhedral Soft Robot
Rolling polyhedral soft robot with novel pneumatic actuators intended for unstructured environments
There are different locomotion modes which have used in robots such as legged locomotion and wheels. Among these modes, rolling locomotion is also one of the types of locomotion used in robots. Rolling robots are often designed as spheres as they allow more freedom while rolling. However, these robots are not inherently stable.
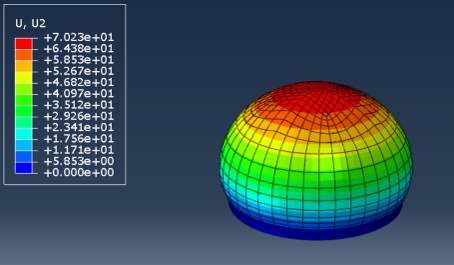
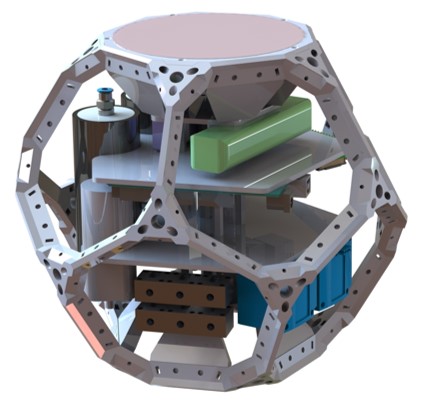
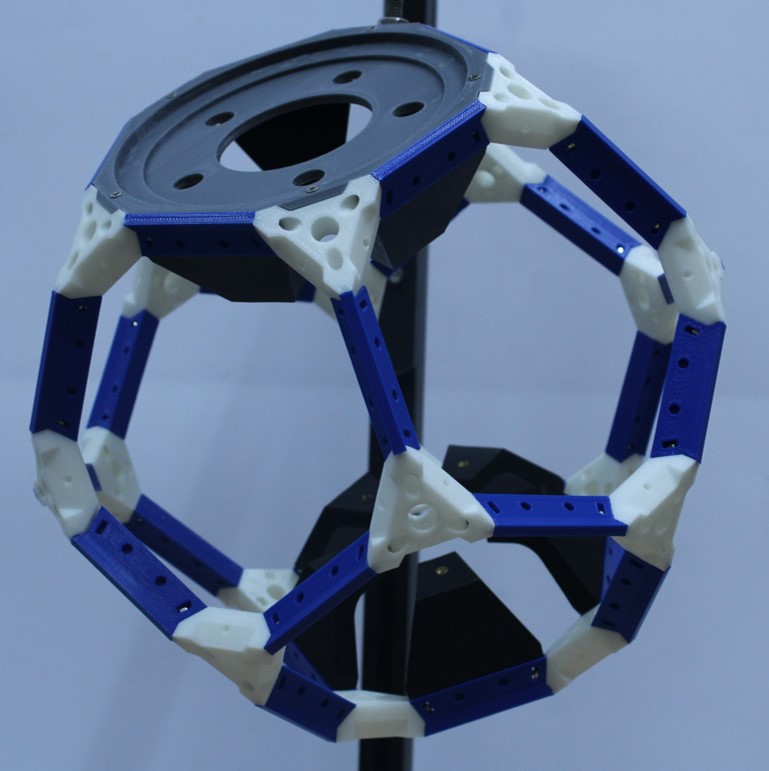 I have been developing a rolling robot which has a polyhedral shape which makes it stable even in inclined surfaces. It has soft pneumatic actuators attached to it’s frame which inflate and roll the robot over. The actuators have a nover design that eliminated the need for adhesives to attach the actuators to the robot as silicon rubber hardly ever sticks to anything. The design allows for seamless and modular connection to the robot, making it effective and easy to maintain and repair.
I have been developing a rolling robot which has a polyhedral shape which makes it stable even in inclined surfaces. It has soft pneumatic actuators attached to it’s frame which inflate and roll the robot over. The actuators have a nover design that eliminated the need for adhesives to attach the actuators to the robot as silicon rubber hardly ever sticks to anything. The design allows for seamless and modular connection to the robot, making it effective and easy to maintain and repair.
The robots moves in a discrete area in the evnironment due to its geometry. The sequence of actuation is made by a software which finds the way in this discrete environment with algorithms such as A*, and outputs the sides that have to be actuated in order.