Internal Model Control of a Digital System
Tracking control of a digital system using the Interal Model princple to achieve zero steady-state error
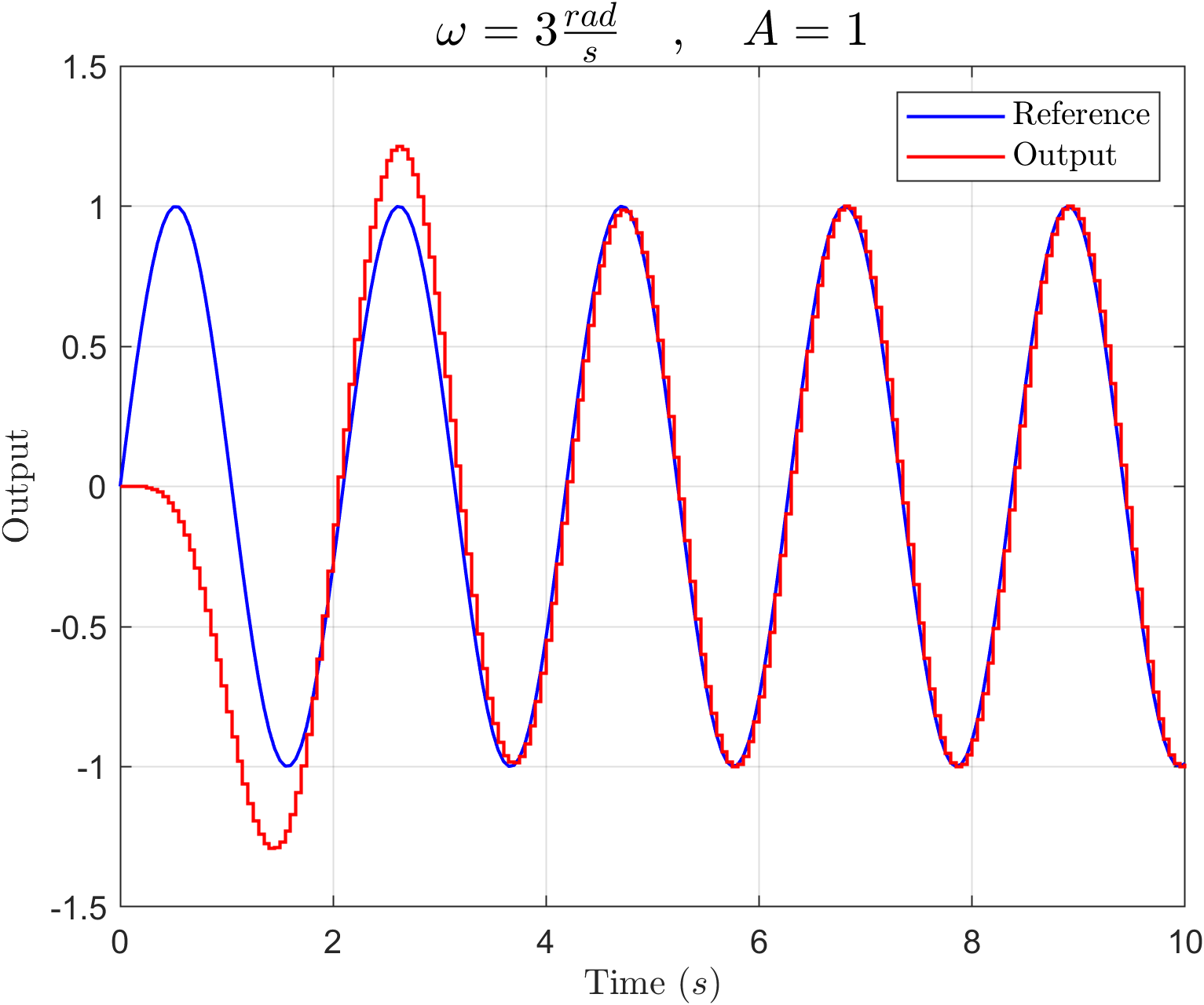
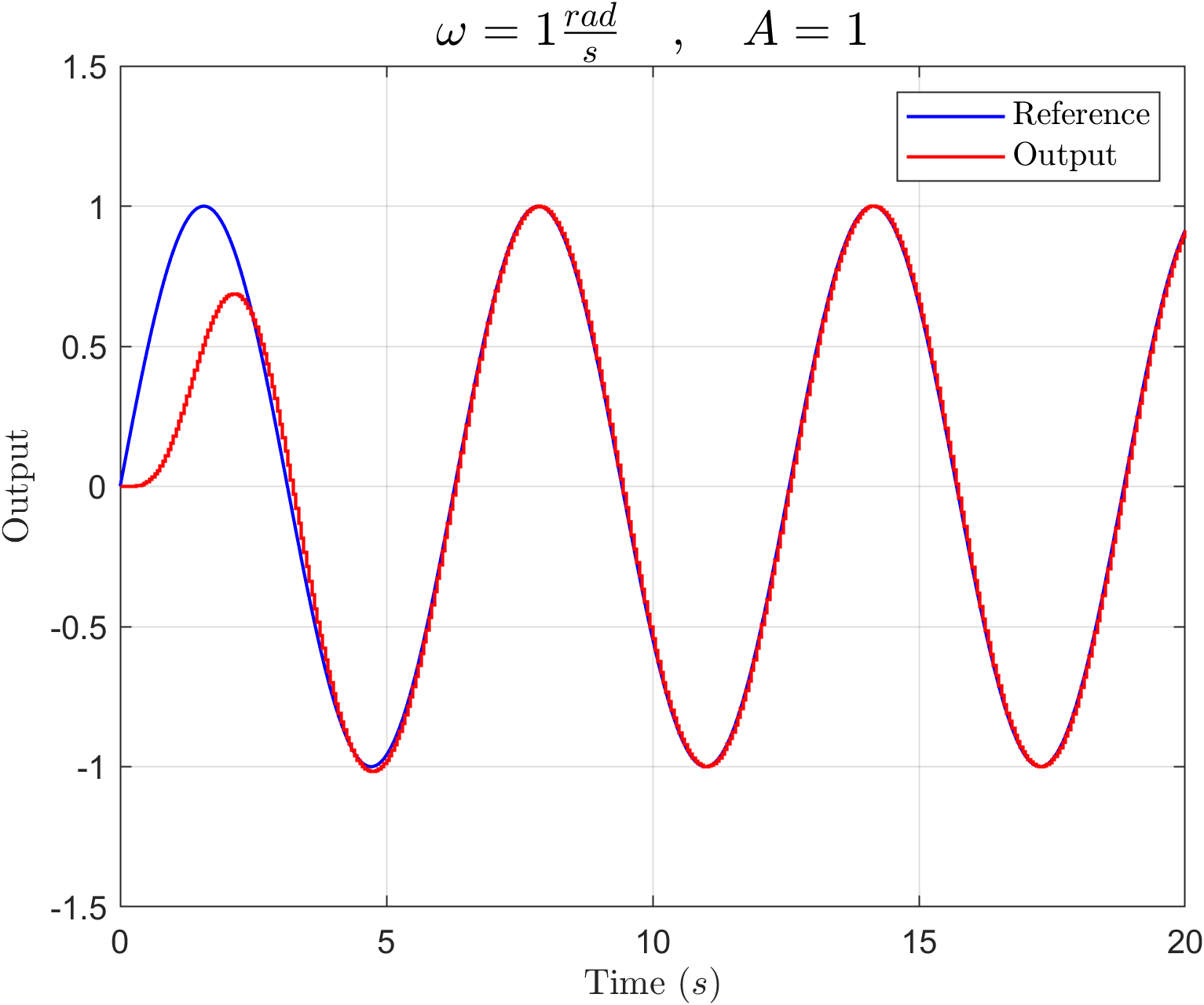
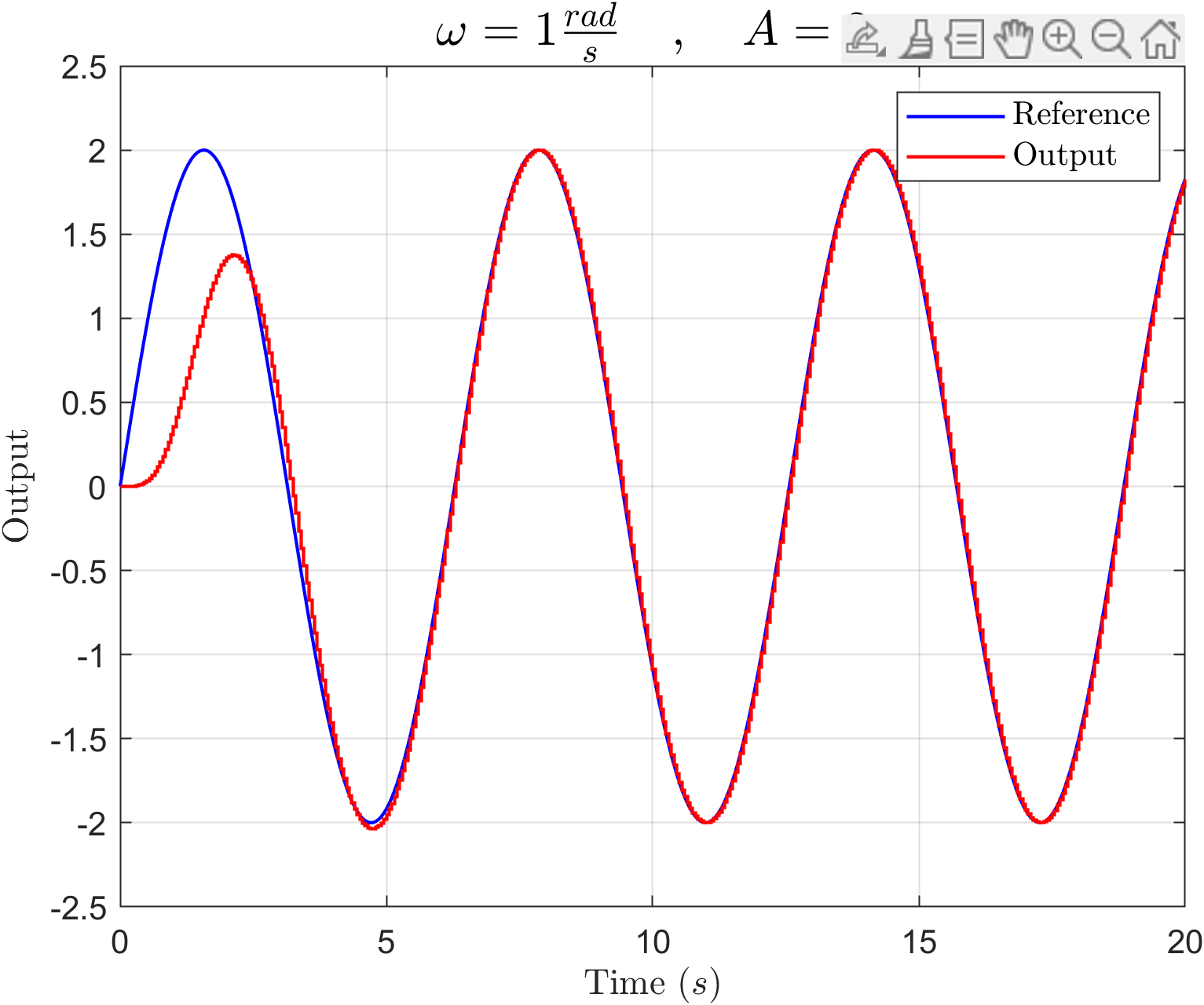
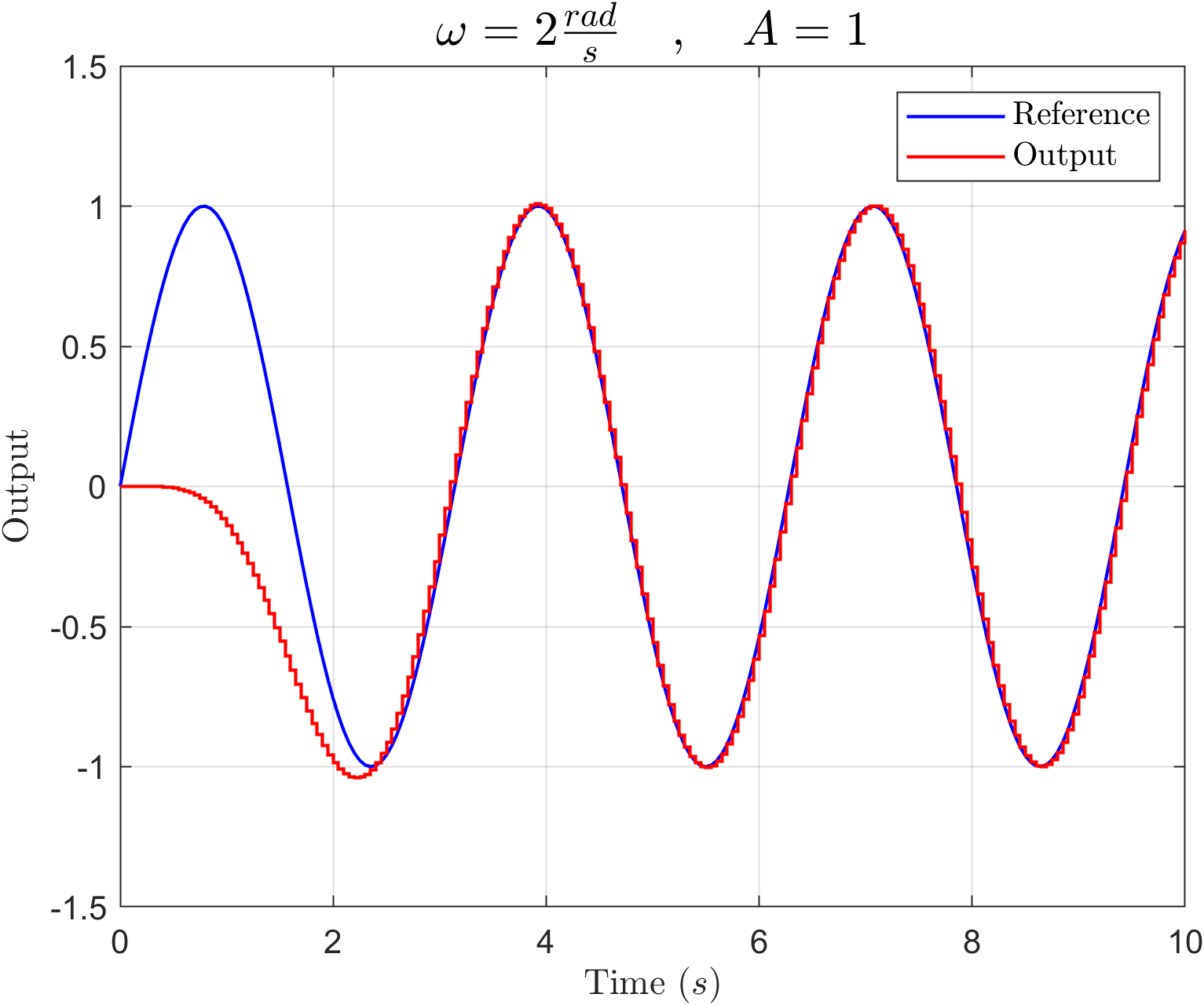
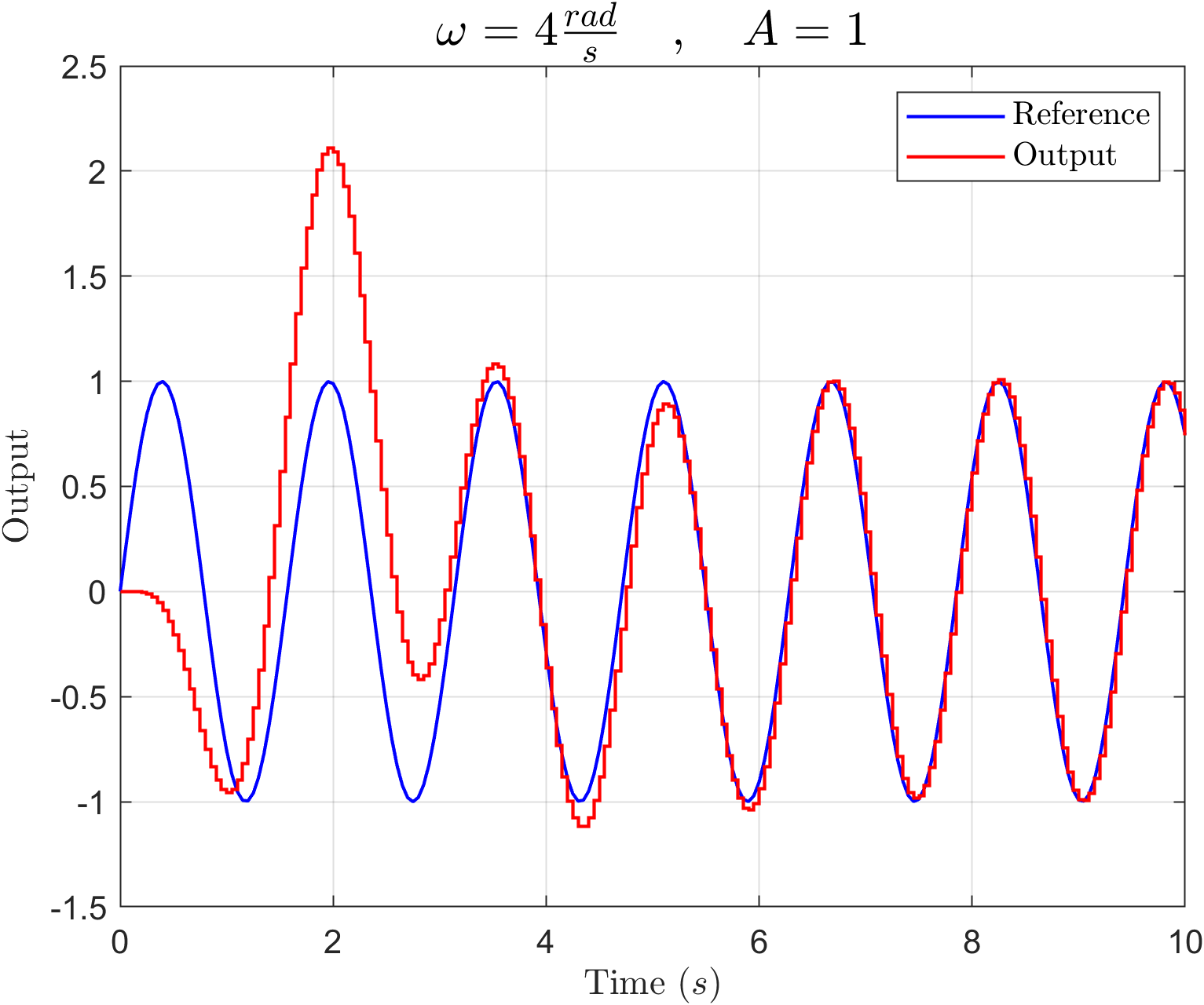
Francis and Wonham put forward the idea in 1975 that for a system to be able to track a reference signal robustly, a model of that signal must be present in the controller. This model is called the internal model, and the method is known as internal model control (IMC). In this project, an implementation of this method is performed in the discrete domain. The overall control diagram is shown below. 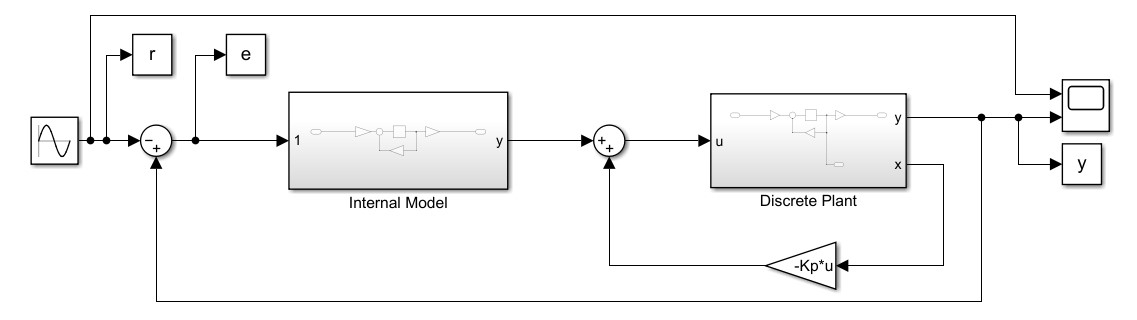 The plant is controlled using pole placement method and the sample time of the system is chosen to be 0.05s. The results clearly show that this method is able to make the system follow the reference signal with no steady-state error for different sinusoidal signal frequencies and amplitudes.
The plant is controlled using pole placement method and the sample time of the system is chosen to be 0.05s. The results clearly show that this method is able to make the system follow the reference signal with no steady-state error for different sinusoidal signal frequencies and amplitudes.
 |  |
 |  |
Please see the detailed report here.