Teams
I have participated in various teams throughout my career and volunteer work. Below is a brief summary of each team, its purpose, and my role within it.
SURENA V Humanoid Robot Team
One of the most renowned robotic teams in Iran, this team is based in the Center of Advanced Systems and Technologies (CAST) led by Prof. Yousefi-Koma. The team has developed 6 humanoid robots until now and is working on the next robot, which is the last and most advanced humanoid of the SURENA series. The robot is named after an Iranian legendary hero, and it is designed with its own personality. This robot introduces novel controllers, machine vision for the robot to have environmental perception, and AI algorithms to make the robot intelligent. Due to my hands-on experience, my main role in this team is to design and build parts for the robot and to maintain and repair the robot. I work with 3D printers and CNC machines to produce parts and assemble different sections. I have also collaborated on a couple of publications on the research conducted on the robot.
- Bazrafshani, M. A., Yousefi-Koma, A., Amani, A., Maleki, B., Batmani, S., Ardakani, A. D., Taheri, S., Yazdankhah, P., Nozari, M., Mozayyan, A., Naeini, A., Shafiee, M., and Vedadi, A. (2024)
Surena-V: A Humanoid Robot for Human-Robot Collaboration with Optimization-based Control Architecture.
In Proceedings of the 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids).
Link to Paper - Vedadi, A., Yousefi-Koma, A., Shariat-Panahi, M., and Nozari, M. (2023)
Kinematic Base State Estimation for Humanoid Using Invariant Extended Kalman Filter.
In Proceedings of the 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), pp. 884–890.
Link to Paper
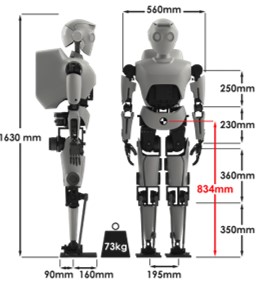
SURENA V Humanoid Robot
IUST Quadruped Robot Team
This team is led by Prof. Shahbazi at the Iran University of Science and Technology, and is one of the few teams working on legged robots in Iran. A quadruped is being designed and developed from scratch with novel control methods such as reinforcement learning. I have been a part of this team during 2020 and 2021 and have helped with the mechanical design of the robot and how to optimize the parts for 3D printing. I have also helped interfacing the actuators and the IMU sensor, as well as building test setups for the robot.
IUST Quadruped
Scientific Society of Mechanical Engineering at IUST
The SSME is a team consisting of passionate students who try to make the academic place a little more favorable. The members are volunteers, and the only goal is to help all students experience a better environment. The SSME organizes visits to industries and related laboratories, software classes, meetings with faculty and professionals, scientific competitions, and more. I am proud to have been a member for 4 years up to 2021, where I was involved with every part of the programs. 
Glider competition organized by the SSME
Editorial Board Of Momentum
A quarterly scientific magazine, Momentum (Tekane), is entirely planned and written by eager mechanical engineering graduate and undergraduate students. It usually covers topics in different fields in mechanical engineering in order to familiarize students with details among various fields of work. I have written and designed infographics for the magazine and have won an award for it in an international competition. 
An Infographic made by me for one of the issues